
Efficiently Planning Soft Non-Planar Area Contact Grasps using 6D Friction Cones
Jingyi Xu, Michael Danielczuk, Eckehard Steinbach, Ken Goldberg
IEEE International Conference on Robotics and Automation (ICRA), 2020.
[PDF] [Presentation] [Website] [Bibtex]
Abstract
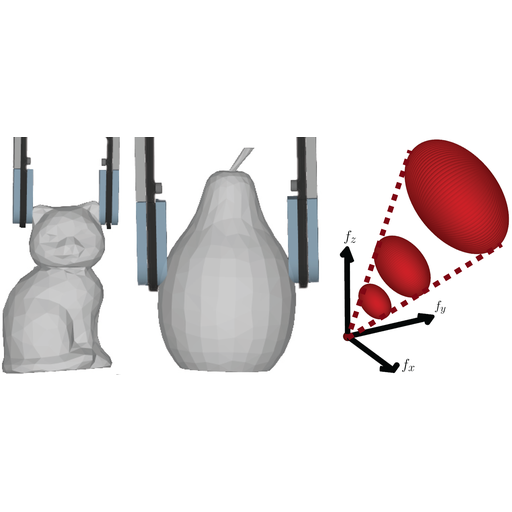
Analytic grasp planning algorithms typically approximate compliant contacts with soft point contact models to compute grasp quality, but these models are overly conservative and do not capture the full range of grasps available. While area contact models can reduce the number of false negatives predicted by point contact models, they have been restricted to a 3D analysis of the wrench applied at the contact and so are still overly conservative. We extend traditional 3D friction cones and present an efficient algorithm for calculating the 6D friction cone (6DFC) for a non-planar area contact between a compliant gripper and a rigid object. We introduce a novel sampling algorithm to find the 6D friction limit surface for a non-planar area contact and a linearization method for these ellipsoids that reduces the computation of 6DFC constraints to a quadratic program. We show that constraining the wrench applied at the contact in this way increases recall, a metric inversely related to the number of false negative predictions, by 17% and precision, a metric inversely related to the number of false positive predictions, by 2% over soft point contact models on results from 1500 physical grasps on 12 3D printed non- planar objects with an ABB YuMi robot. The 6DFC algorithm also achieves 6% higher recall with similar precision and 85x faster runtime than the REACH model.