
Publications
You can also find my publications on my Google Scholar profile.
Journal Papers
Learning Ambidextrous Robot Grasping Policies
Jeffrey Mahler, Matthew Matl, Vishal Satish, Michael Danielczuk, Bill DeRose, Stephen McKinley, Ken Goldberg
Science Robotics, 2019.
[PDF] [Supplement] [Website] [Bibtex]
Conference Papers
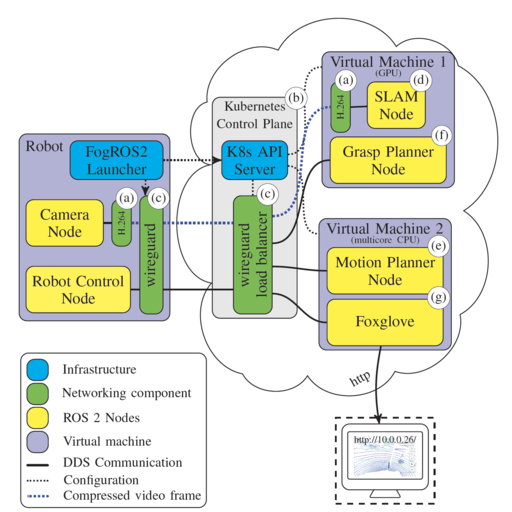
FogROS2: An Adaptive Platform for Cloud and Fog Robotics Using ROS 2
Jeffrey Ichnowski, Kaiyuan Chen, Karthik Dharmarajan, Simeon Adebola, Michael Danielczuk, Víctor Mayoral-Vilches, Nikhil Jha, Hugo Zhan, Edith Llontop, Derek Xu, John Kubiatowicz, Ion Stoica, Joseph Gonzalez, Ken Goldberg
To appear at IEEE International Conference on Robotics and Automation (ICRA), 2023.

Mechanical Search on Shelves with Efficient Stacking and Destacking of Objects
Huang Huang, Letian Fu, Michael Danielczuk, Chung Min Kim, Zachary Tam, Jeffrey Ichnowski, Anelia Angelova, Brian Ichter, Ken Goldberg
International Symposium on Robotics Research (ISRR), 2022.

Optimal Shelf Arrangement to Minimize Robot Retrieval Time
Lawrence Yunliang Chen, Huang Huang, Michael Danielczuk, Jeffrey Ichnowski, Ken Goldberg
IEEE Conference on Automation Science and Engineering (CASE), 2022.
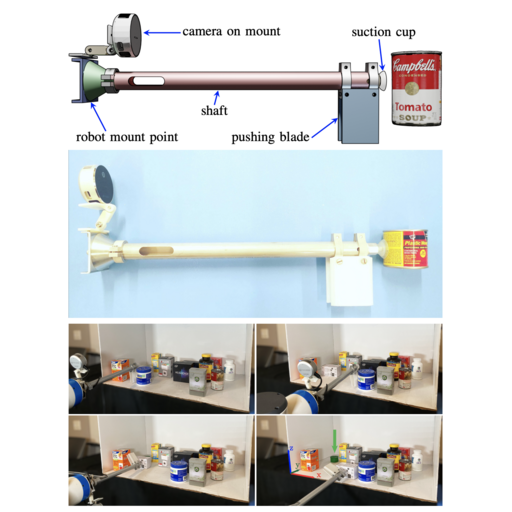
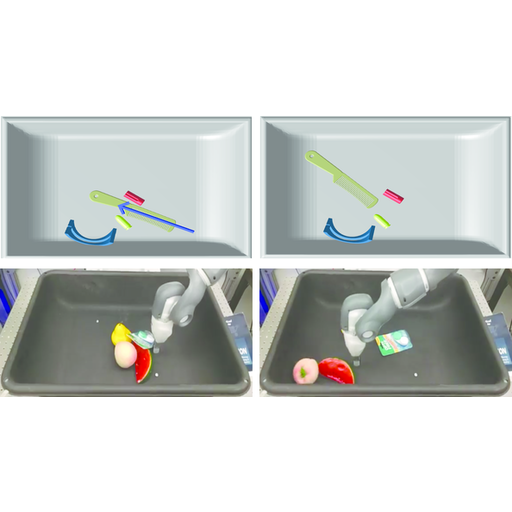
Mechanical Search on Shelves using a Novel “Bluction” Tool
Huang Huang, Michael Danielczuk, Chung Min Kim, Letian Fu, Zachary Tam, Jeffrey Ichnowski, Anelia Angelova, Brian Ichter, Ken Goldberg
IEEE International Conference on Robotics and Automation (ICRA), 2022.

LEGS: Learning Efficient Grasp Sets for Exploratory Grasping
Letian Fu, Michael Danielczuk, Ashwin Balakrishna, Daniel S. Brown, Jeffrey Ichnowski, Eugen Solowjow, Ken Goldberg
IEEE International Conference on Robotics and Automation (ICRA), 2022.

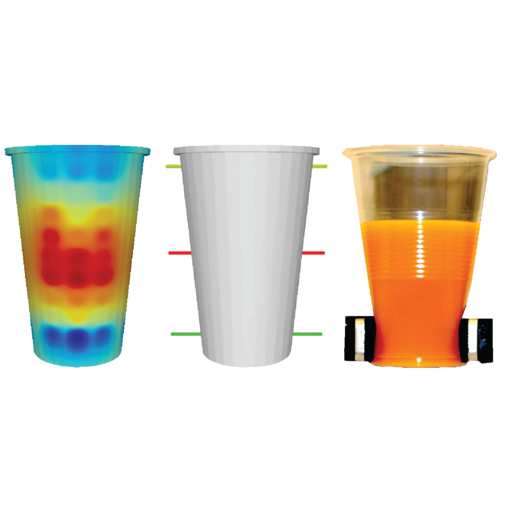
A Multi-Chamber Smart Suction Cup for Adaptive Gripping and Haptic Exploration
Tae Myung Huh, Kate Sanders, Michael Danielczuk, Monica Li, Ken Goldberg, Hannah S. Stuart
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021.
Mechanical Search on Shelves using Lateral Access X-RAY
Huang Huang*, Marcus Dominguez-Kuhne*, Jeffrey Ichnowski, Vishal Satish, Michael Danielczuk , Kate Sanders, Andrew Lee, Anelia Angelova, Vincent Vanhoucke, Ken Goldberg
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021.

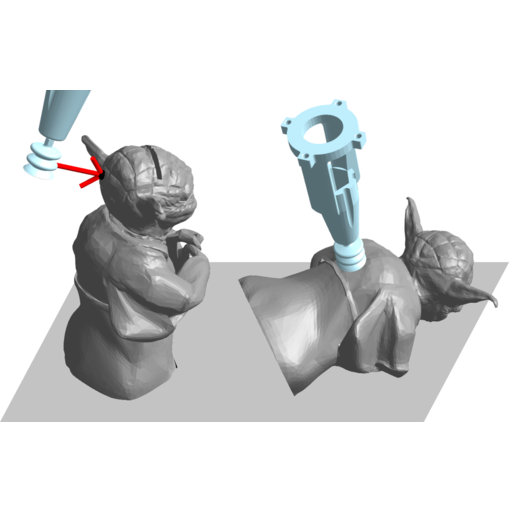
Kit-Net: Self-Supervised Learning to Kit Novel 3D Objects into Novel 3D Cavities
Shivin Devgon, Jeffrey Ichnowski, Michael Danielczuk, Daniel S. Brown, Ashwin Balakrishna, Shirin Joshi, Eduardo M. C. Rocha, Eugen Solowjow, Ken Goldberg
IEEE Conference on Automation Science and Engineering (CASE), 2021.
[PDF] [Video] [Presentation] [Code] [Bibtex]
FogROS: An Adaptive Framework for Automating Fog Robotics Deployment
Kaiyuan (Eric) Chen, Yafei Liang, Nikhil Jha, Jeffrey Ichnowski, Michael Danielczuk, Joseph Gonzalez, John Kubiatowicz, Ken Goldberg
IEEE Conference on Automation Science and Engineering (CASE), 2021.
[PDF] [Presentation] [Code] [Bibtex]

AVPLUG: Approach Vector PLanning for Unicontact Grasping amid Clutter
Yahav Avigal, Vishal Satish, Zachary Tam, Huang Huang, Harry Zhang, Michael Danielczuk, Jeffrey Ichnowski, Ken Goldberg
IEEE Conference on Automation Science and Engineering (CASE), 2021.
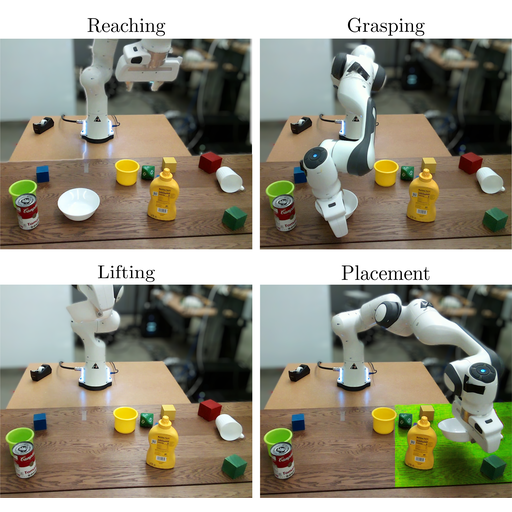
Object Rearrangement Using Learned Implicit Collision Functions
Michael Danielczuk*, Arsalan Mousavian*, Clemens Eppner, Dieter Fox
IEEE International Conference on Robotics and Automation (ICRA), 2021.
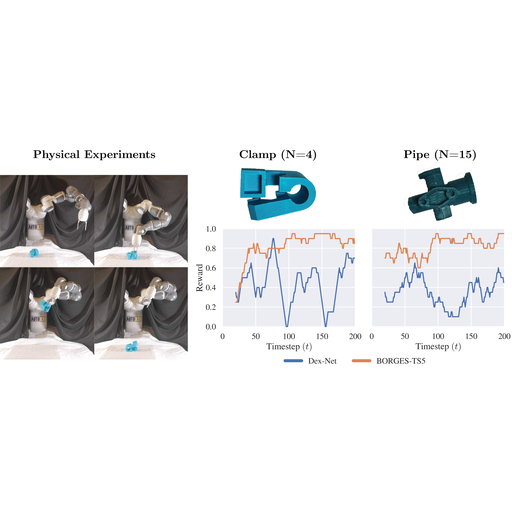
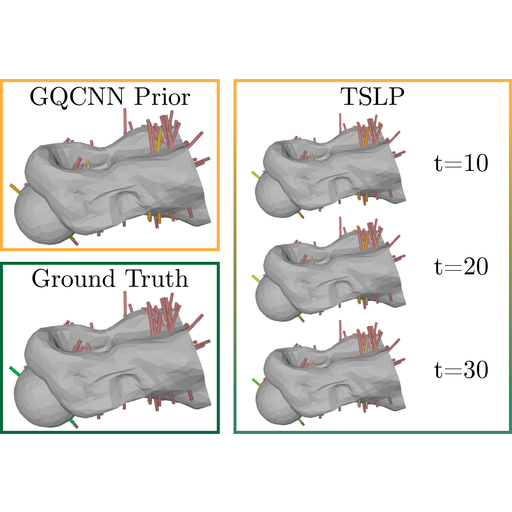
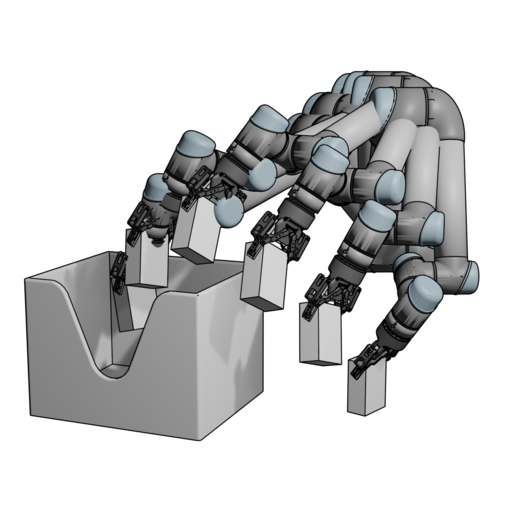
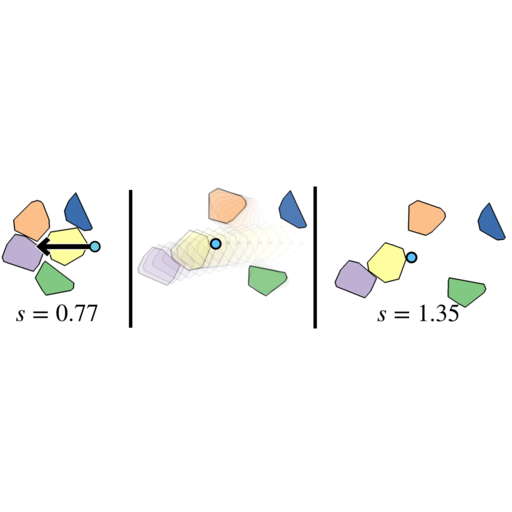
Exploratory Grasping: Asymptotically Optimal Algorithms for Grasping Challenging Polyhedral Objects
Michael Danielczuk*, Ashwin Balakrishna*, Daniel S. Brown, Shivin Devgon, Ken Goldberg
Conference on Robot Learning (CoRL), 2020.
[PDF] [Presentation] [Website] [Code] [Bibtex]
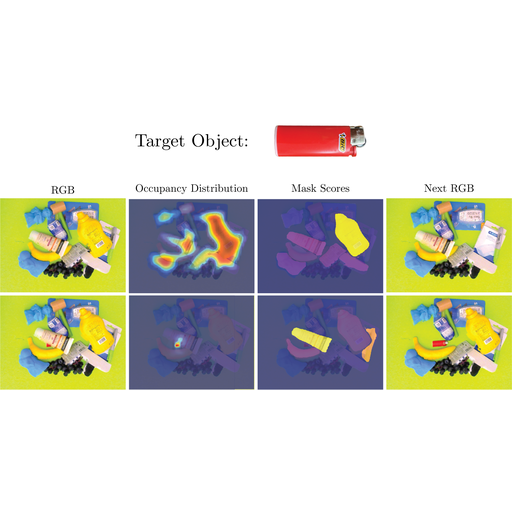
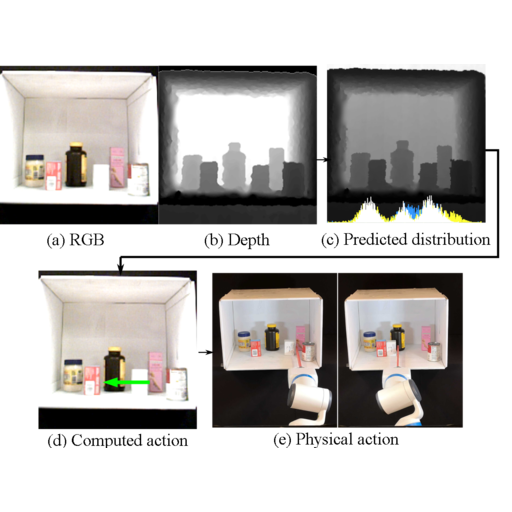
X-Ray: Mechanical Search for an Occluded Object by Minimizing Support of Learned Occupancy Distributions
Michael Danielczuk, Anelia Angelova, Vincent Vanhoucke, Ken Goldberg
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020.
[PDF] [Video] [Presentation] [Website] [Bibtex]
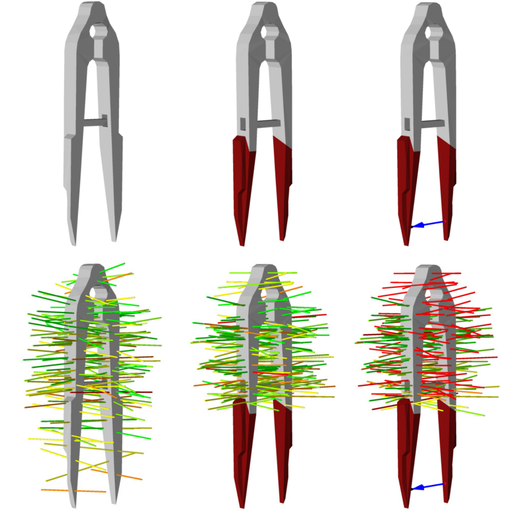
Accelerating Grasp Exploration by Leveraging Learned Priors
Han Yu Li*, Michael Danielczuk*, Ashwin Balakrishna*, Vishal Satish, Ken Goldberg
IEEE Conference on Automation Science and Engineering (CASE), 2020.
Robust Task-Based Grasping as a Service
Jingyi Song, Ajay Tanwani, Jeffrey Ichnowski, Michael Danielczuk, Kate Sanders, Jackson Chui, Juan A. Ojea, Ken Goldberg
IEEE Conference on Automation Science and Engineering (CASE), 2020.
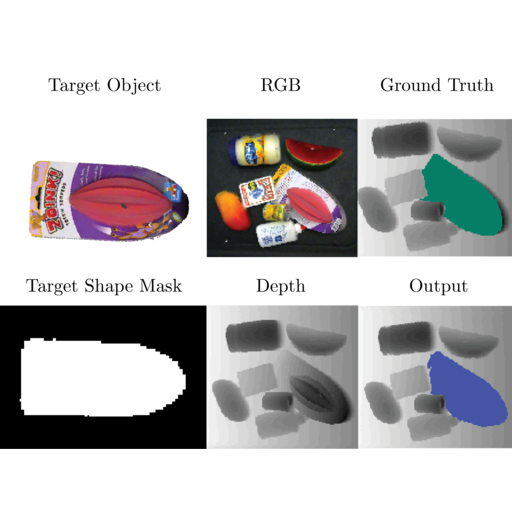
One-Shot Shape-Based Amodal-to-Modal Instance Segmentation
Andrew Li, Michael Danielczuk, Ken Goldberg
IEEE Conference on Automation Science and Engineering (CASE), 2020.

Non-Markov Policies to Reduce Sequential Failures in Robot Bin Picking
Kate Sanders, Michael Danielczuk, Jeffrey Mahler, Ajay Tanwani, Ken Goldberg
IEEE Conference on Automation Science and Engineering (CASE), 2020.
GOMP: Grasp-Optimized Motion Planning for Bin Picking
Jeff Ichnowski, Michael Danielczuk, Jingyi Xu, Vishal Satish, Ken Goldberg
IEEE International Conference on Robotics and Automation (ICRA), 2020.
[PDF] [Presentation] [Website] [Bibtex]
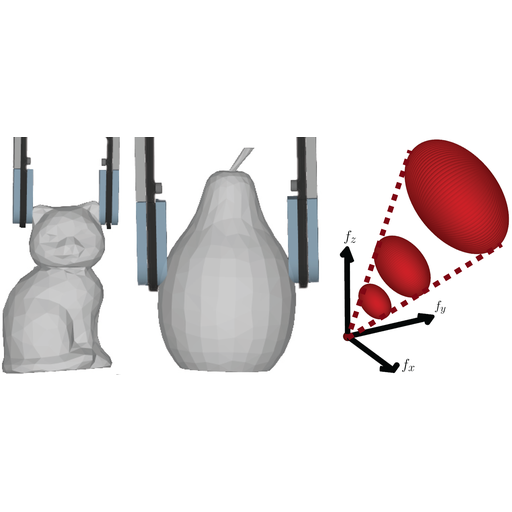
Efficiently Planning Soft Non-Planar Area Contact Grasps using 6D Friction Cones
Jingyi Xu, Michael Danielczuk, Eckehard Steinbach, Ken Goldberg
IEEE International Conference on Robotics and Automation (ICRA), 2020.
[PDF] [Presentation] [Website] [Bibtex]
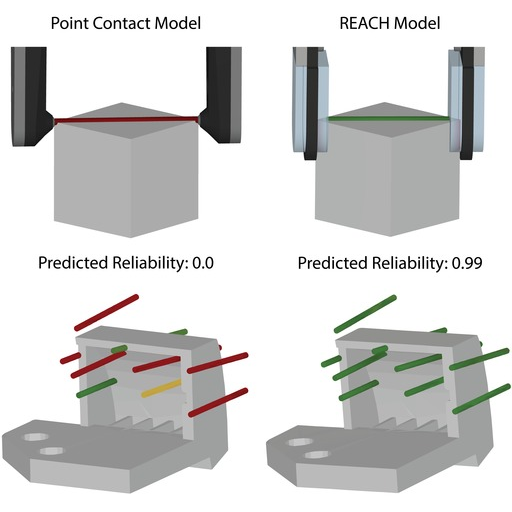
REACH: Reducing False Negatives in Robot Grasp Planning with a Robust Efficient Area Contact Hypothesis Model
Michael Danielczuk, Jingyi Xu, Jeffrey Mahler, Matthew Matl, Nuttapong Chentanez, Ken Goldberg
International Symposium on Robotics Research (ISRR), 2019.
Robust Toppling for Vacuum Suction Grasping
Christopher Correa, Jeffrey Mahler, Michael Danielczuk, Ken Goldberg
IEEE International Conference on Automation Science and Engineering (CASE), 2019.
Automating Planar Object Singulation by Linear Pushing with Single-point and Multi-point Contacts
Zisu Dong, Sanjay Krishnan, Sona Dolasia, Ashwin Balakrishna, Michael Danielczuk, Ken Goldberg
IEEE International Conference on Automation Science and Engineering (CASE), 2019.
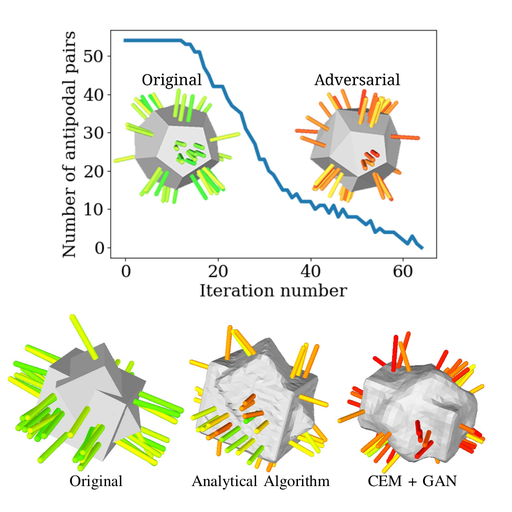
Adversarial Grasp Objects
David Wang, David Tseng, Pusong Li, Yiding Jiang, Menglong Guo, Michael Danielczuk, Jeffrey Mahler, Jeffrey Ichnowski, Ken Goldberg
IEEE International Conference on Automation Science and Engineering (CASE), 2019.

Segmenting Unknown 3D Objects from Real Depth Images using Mask R-CNN Trained on Synthetic Data
Michael Danielczuk, Matthew Matl, Saurabh Gupta, Andrew Li, Andrew Lee, Jeffrey Mahler, Ken Goldberg
IEEE International Conference on Robotics and Automation (ICRA), 2019.
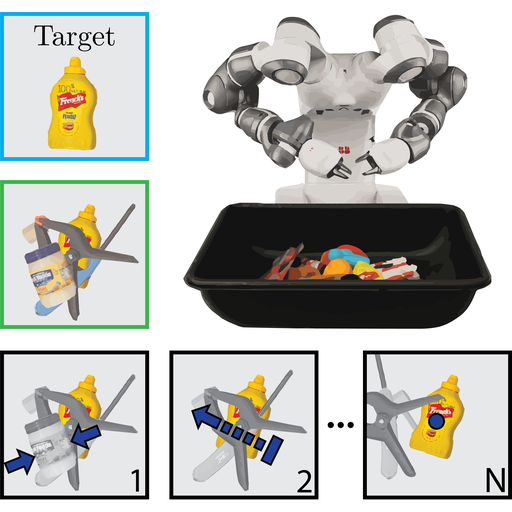
Mechanical Search: Multi-Step Retrieval of a Target Object Occluded by Clutter
Michael Danielczuk*, Andrey Kurenkov*, Ashwin Balakrishna, Matthew Matl, David Wang, Roberto Martín-Martín, Animesh Garg, Silvio Savarese,Ken Goldberg
IEEE International Conference on Robotics and Automation (ICRA), 2019.
Linear Push Policies to Increase Grasp Access for Robot Bin Picking
Michael Danielczuk, Jeffrey Mahler, Chris Correa, Ken Goldberg
IEEE International Conference on Automation Science and Engineering (CASE), 2018.